こんにちは、ENGかぴです。
PIC16F1827はシリアル通信機能(EUSART)を持っているため外部機器と通信を行うことができます。MCCを使用してEUSARTの設定を行いArudino UNOとシリアル通信を行いシリアルモニタで動作確認を行いました。
応用編として電文を作成して外部機器からPIC16F1287を操作させています。
PIC16F1827で動作確認したことについてリンクをまとめています。
PICマイコン(PIC16F1827)で実現できる機能と解説リンクまとめ
EUSARTを実装する
PIC16F1827の設定はMCCを使っています。MCCの使い方については下記記事にまとめています。
MPLAB Code Configurator(MCC)の追加と使い方
今回はMCCを使用してEUSART及びTMR0の設定を行っています。
System Moduleの設定
最初に共通事項であるSystem Moduleの設定を行います。MPLAB X IDEを起動しMCCのアイコンをクリックしてMCCを有効にします。
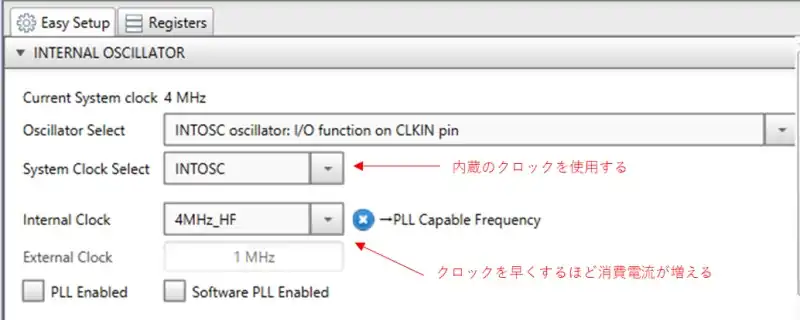
内部クロックを使用するためINTOSCを選択しています。クロック周波数は任意でもよいですが4MHz_HFを選択しています。クロックを高速にするほど消費電流が増えてしまいます。他にも設定項目はありますがクロックの設定のみとしています。
EUSARTを設定する
PICマイコンのシリアル通信はEUSARTと表現されています。シリアル通信はMSSPの設定によりSPI通信やI2C通信も実現することができます。EUSARTはDevice Resources内のPeripherals欄のEUSARTを選択して追加します。
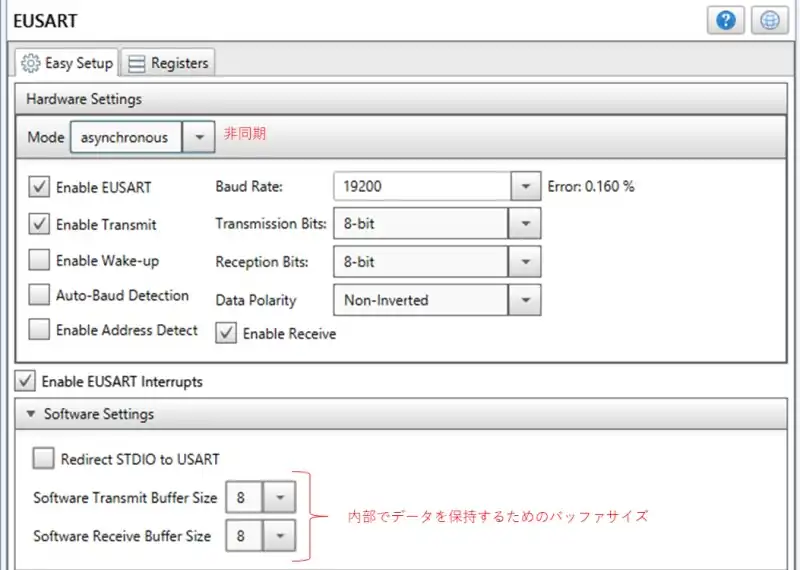
EUSARTを非同期で使用するためにModeでasynchronousを選択しEnable Transmit及びEnable Receiveにチェックを入れます。Baud Rateは19200bpsとしていますが任意でも構いません。
送信や受信時に割り込みを使用してデータの格納を行う方が確実なデータ取得がしやすいためEnable EUSART Interruptsをチェックし割り込みを使用しています。
データの取得が遅れたりするとオーバーランが発生することがあるため可能な限り受信時にレジスタからデータを獲得しておくことが推奨されます。
パリティを使用しないためTransmission Bits及びReception Bitsを8ビット構成にしています。
Software Settings欄にはTransmit Buffer SizeやReceive Buffer Sizeで割り込み時にデータを一時保存しておくバッファのサイズを選択できますがサイズを大きくするとデータ容量が増えてしまい使用できるRAMサイズを圧迫するため少なめの値にしておく方が良いでしょう。
PR:RUNTEQ(ランテック )- マイベスト4年連続1位を獲得した実績を持つWebエンジニア養成プログラミングスクール
TMR0を設定する
TMR0はDevice Resources内のPeripherals欄のTimerを選択しTMR0をクリックして追加します。
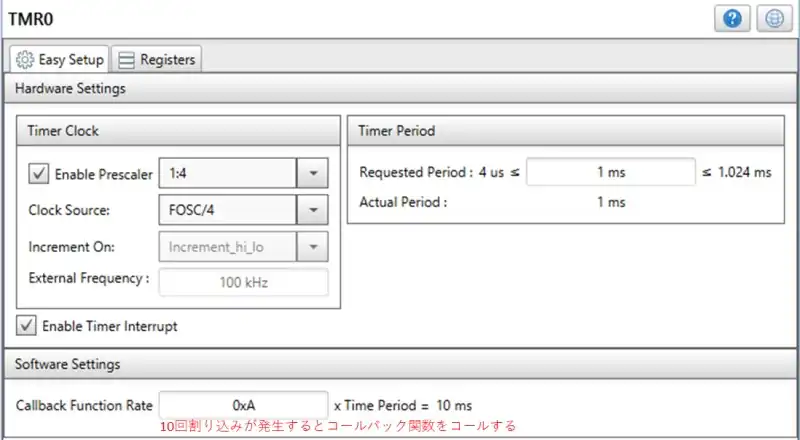
Timer Clock内でクロックに関する設定を行います。Clock Sourceは内部クロックを使用しているためFOSC(FOSC/4)を指定します。PrescalerはClock Sourceに対してTMR0のカウントアップする分周比を指定します。
Timer PeriodはTMR0がオーバーフローするタイミングを設定します。1ms毎にオーバーフロー割り込みが発生しますがCallback Function Rateを0x0A(10)を指定しているため10ms毎にコールバック関数が呼び出されます。
void mainTimer(void); //タイマー0割り込みのコールバック関数
//コールバック関数の使用例
TMR0_SetInterruptHandler(mainTimer); //コールバック関数を指定上記例ではmainTimer()が10ms毎にコールされます。
PR:スキマ時間で自己啓発!スマホで学べる人気のオンライン資格講座【スタディング】まずは気になる講座を無料で体験しよう!
動作確認
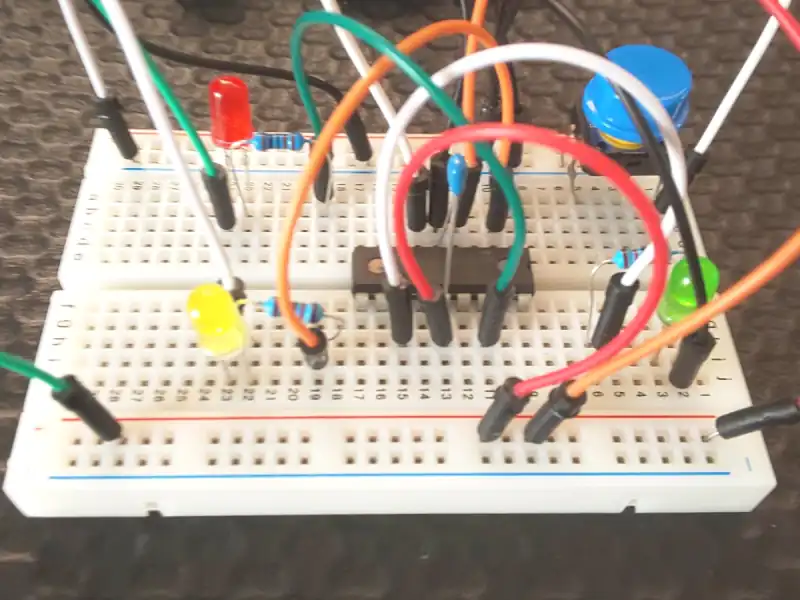
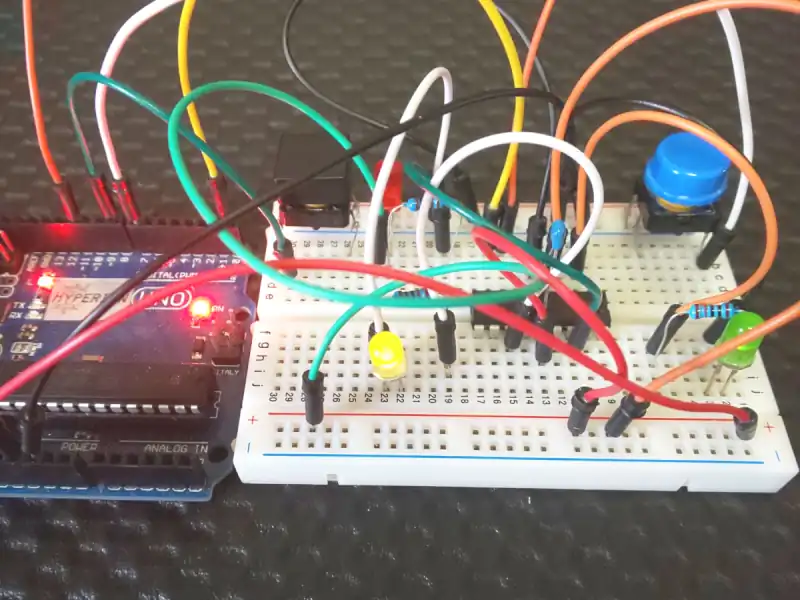
PIC16F1827とArduino UNOを接続してシリアル通信の動作確認を行います。通信条件はボーレートが19200bps、パリティなしとします。
動作確認用の回路
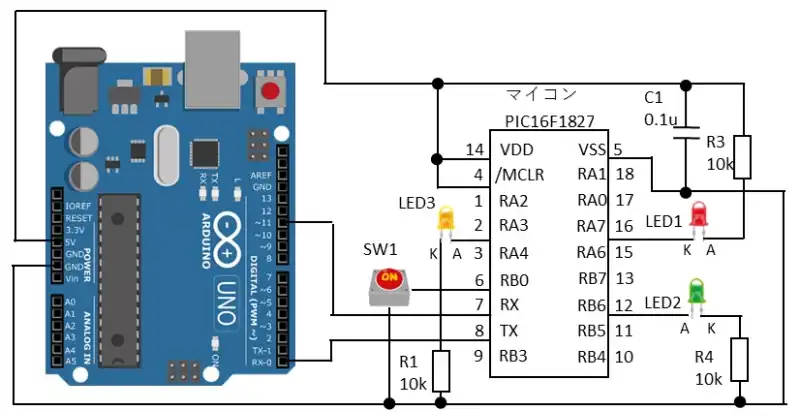
Arduino UNOではソフトウェアシリアルのライブラリを使用してPIC16F1827とシリアル通信を行います。
対策としてソフトウェアシリアルのライブラリを使用しています。Arudino UNOのTXはシリアルモニタの表示のみで使用しデータの送信をソフトウェアシリアルのTXである11ピンから送信するようにしています。Arudino UNOのRXはシリアルモニタに表示するために使用しています。
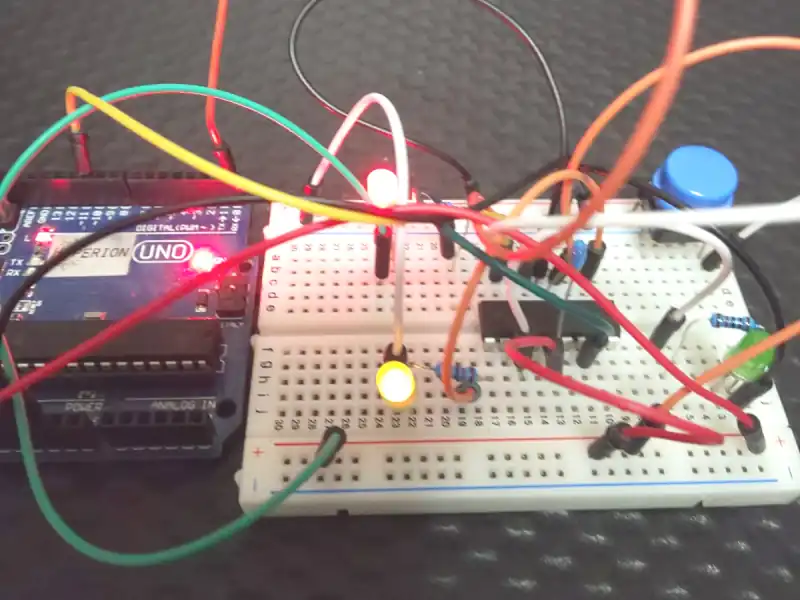
Arduino UNOからはシリアルモニタを起動したときに一度だけ文字列を送信しPIC16F1827は送信した文字列をそのまま返信してエコーバックするようにします。受信処理が発生するとLED2が点灯/消灯を切り替えます。
PIC16F1827からはSW1を押したときArduino UNOに対して「PIC-OK」の文字列を送信するようにします。LED1は送信処理が発生すると点灯/消灯を切り替えます。
RB0はウィークプルアップしているため信号レベルが浮くことはありません。SW1を押すとLED3が点灯し押さない場合はLED3が消灯するようにします。
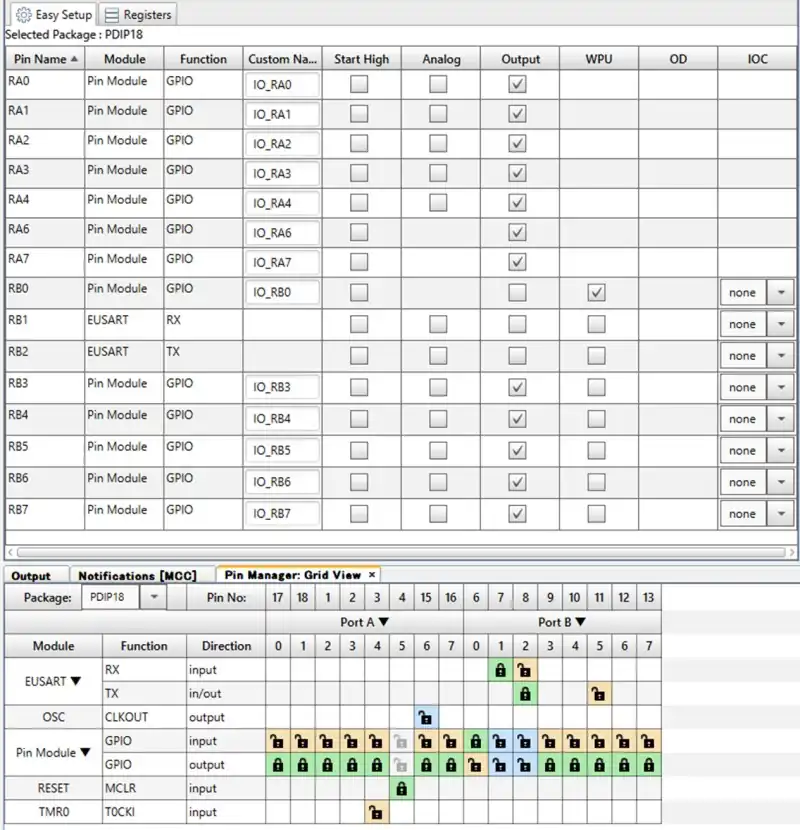
PB0はINPUTでウィークプルアップ(WPU)設定しています。WPUを有効にするためにはRegistersのnWPUENをenabledにする必要があります。
Easy SetupでWPUにチェックするのみでは有効にならないので注意が必要です。Notificationsにワーニングで通知されます。
受信データを送信する
Arduino UNOから受信したデータの取得と送信をMCCが生成した関数を使用して実装します。
void mainApp(void){
if(EUSART_is_rx_ready()){ //受信したデータがあるか
rxData = EUSART_Read(); //受信データを取得
picRcv.buf[picRcv.wp] = rxData;
if( ++picRcv.wp >= sizeof(picRcv.buf)){
picRcv.wp = 0;
}
if(EUSART_is_tx_ready()){ //送信可能であるか
EUSART_Write(rxData); //データを送信
}
IO_RB6_Toggle();
}
}MCCが生成したeusart.hに実装例がありますがEUSART.Read()を使用する際は受信データがあるかを確認するEUSART_is_rx_ready()を先に使用する必要があります。
同様にEUSART_Write()を使用する際は送信時も送信可能であるか(送信ビジーでないか)を確認するEUSART_is_tx_ready()を先に使用する必要があります。
変数rxDataにReadしたデータを格納しておきWriteにセットすることで受信データをそのまま送信することができます。
任意のデータを送信する
任意のデータを送信する例を示します。送信したいデータを変数に格納しておき順番にセットしていきます。
void TxDataSet(void){
Txdata.cnt = 0;
Txdata.data[0] = 'P';
Txdata.data[1] = 'I';
Txdata.data[2] = 'C';
Txdata.data[3] = '-';
Txdata.data[4] = 'O';
Txdata.data[5] = 'K';
timTxWait = TIME_TX_MAX; //送信のタイムアウトをセット
}
/* 以下はメイン処理内に実装 */
if( timTxWait > TIME_UP ){
if(EUSART_is_tx_ready()){
if( Txdata.cnt < sizeof(Txdata.data)){ //送信データ数に達したか
EUSART_Write(Txdata.data[Txdata.cnt]); //次の送信データを選択
++Txdata.cnt; //次の送信データを選択
}
else{ //送信完了
timTxWait = TIME_OFF;
}
}
}
else if( timTxWait == TIME_UP){ //送信タイムアウト
timTxWait = TIME_OFF;
} Txdata[]の配列に送信したいデータをセットしTxdata.cntで次の送信データを示すカウントを管理します。timTxWaitは最初の送信から一定期間経過以内に送信が完了するかを確認するためのタイムアウトとして使用します。
TxDataSet()を送信開始したい箇所で一度だけコールして任意のデータをセットしメイン処理で周回させながらデータの送信を行います。動作確認用の回路図においてSW1を押したときにTxDataSet()をコールして送信を開始しています。(ソースコード全体参照)
動作結果
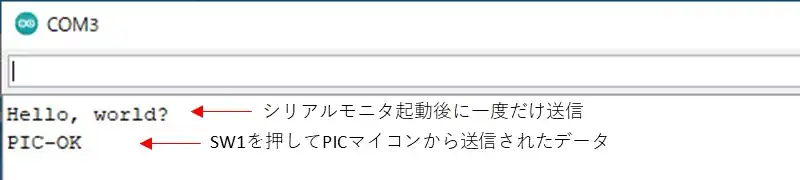
Arduinoのシリアルモニタを使用して動作確認を行うとシリアルモニタ起動後にArudino UNOから送信した文字列がPIC16F1827を介して受信できていました。またSW1を押すとPIC-OKが受信できていました。
ソースコード全体
ソースコードは記事作成時点において動作確認できていますが、使用しているライブラリの更新により動作が保証できなくなる可能性があります。また、ソースコードを使用したことによって生じた不利益などの一切の責任を負いかねます。参考資料としてお使いください。
#include "mcc_generated_files/mcc.h"
#define TIME_OFF -1 //タイマーを使用しない場合
#define TIME_UP 0 //タイムアップ
#define TIME_FILTER_MAX 1 //ベースタイマカウント値
#define TIME_TX_MAX 10
#define CNT_INIT_MAX 10 //10ms×10 = 100ms
#define RING_SZ 64
#define SZ_MASK 0x3F
#define DI_NUM 4 //DIフィルタのサンプリング数
#define TX_SZ 6
typedef struct{
uint8_t wp;
uint8_t rp;
uint8_t buf[RING_SZ];
}RING_MNG;
typedef struct{
uint8_t wp;
uint8_t buf[ DI_NUM ];
uint8_t di;
}FILT_DATA;
typedef struct{
uint8_t cnt;
uint8_t data[TX_SZ];
}TX_MNG;
//--------------変数定義----------------------------
int8_t timfilter;
int8_t timTxWait;
RING_MNG picRcv;
uint8_t CntInit; //初期化時のみ使用
int8_t rxData;
FILT_DATA DiData;
bool btn1hold;
TX_MNG Txdata;
//--------------関数プロトタイプ宣言----------------------------
void mainApp(void);
void mainTimer(void); //タイマー0割り込みでの処理
void DiFilter(void);
void DiFilterInit(void);
void DiFilter(void);
void TxDataSet(void);
/* Main application */
void main(void)
{
SYSTEM_Initialize();
TMR0_SetInterruptHandler(mainTimer); //コールバック関数を指定
INTERRUPT_GlobalInterruptEnable(); //割り込みの許可
INTERRUPT_PeripheralInterruptEnable(); //ペリフェラル割り込みの許可
DiFilterInit(); //メイン処理前にDIを確定する
while (1)
{
mainApp();
DiFilter();
}
}
/* main処理 */
void mainApp(void){
if(EUSART_is_rx_ready()){ //受信したデータがあるか
rxData = EUSART_Read(); //受信データを取得
picRcv.buf[picRcv.wp] = rxData;
if( ++picRcv.wp >= sizeof(picRcv.buf)){
picRcv.wp = 0;
}
if(EUSART_is_tx_ready()){ //送信可能であるか
EUSART_Write(rxData); //データを送信
}
IO_RB6_Toggle();
}
if( DiData.di == 0 ){
if( btn1hold == false ){
btn1hold = true;
TxDataSet(); //送信準備
}
}else{
btn1hold = false;
}
if( timTxWait > TIME_UP ){
if(EUSART_is_tx_ready()){
if( Txdata.cnt < sizeof(Txdata.data)){ //送信データ数に達したか
EUSART_Write(Txdata.data[Txdata.cnt]); //送信
++Txdata.cnt; //次の送信データを選択
}
else{ //送信完了
timTxWait = TIME_OFF;
}
IO_RA7_Toggle();
}
}
else if( timTxWait == TIME_UP){ //送信タイムアウト
timTxWait = TIME_OFF;
}
}
/* 送信準備関数 */
void TxDataSet(void){
Txdata.cnt = 0;
Txdata.data[0] = 'P';
Txdata.data[1] = 'I';
Txdata.data[2] = 'C';
Txdata.data[3] = '-';
Txdata.data[4] = 'O';
Txdata.data[5] = 'K';
timTxWait = TIME_TX_MAX; //送信のタイムアウトをセット
}
/* タイマ管理関数(コールバック) */
void mainTimer(void){
if( timfilter > TIME_UP ){
--timfilter; //タイマを更新
}
if( timTxWait > TIME_UP){
--timTxWait;
}
}
// DIフィルタの初期化 //
void DiFilterInit(void){
CntInit = CNT_INIT_MAX;
while(CntInit > 0){ //0になるまでフィルタを実施
DiFilter(); //DIフィルタ処理
__delay_ms(10); //10ms遅延させてDIフィルタ処理
CntInit--;
timfilter = TIME_UP;
}
}
//--------モード切替部のDIフィルタ----------------------------
void DiFilter(void){
uint8_t i;
bool boo = true;
if( timfilter == TIME_UP ){
timfilter = TIME_FILTER_MAX;
DiData.buf[ DiData.wp ] = IO_RB0_GetValue();
for( i = 1; i < DI_NUM; i++){
if( DiData.buf[i-1] != DiData.buf[i] ){
boo = false;
break;
}
}
if( boo ){ //比較して一致したら値を採用
DiData.di = DiData.buf[ 0 ];
IO_RA3_LAT = DiData.di;
}
if( ++DiData.wp >= DI_NUM){
DiData.wp = 0;
}
}
}本ソースコードはMPLAB X IDEにMCCのプラグインをインストールしていることが前提となります。MCCをインストールする方法は下記記事を参考にしてください。
MPLAB Code Configurator(MCC)の追加と使い方
Arduinoのソースコード:
#include <SoftwareSerial.h>
SoftwareSerial mySerial(10, 11); // RX, TX
void setup() {
Serial.begin(19200);
mySerial.begin(19200);
mySerial.println("Hello, world?"); //PICに一度だけ送信
}
void loop() {
while( Serial.available()){ //受信データがあるか
Serial.write(Serial.read()); //受信データを取得してシリアルモニタに表示
}
}関連リンク
PICマイコンを使ってマイコンのレジスタの設定やMPLAB X IDEのプラグインであるMCCを使用して動作確認したことについてまとめています。
PICマイコン(PIC12F675)で実現できる機能と解説リンクまとめ
PICマイコン(PIC16F1827)で実現できる機能と解説リンクまとめ
最後まで、読んでいただきありがとうございました。