こんにちは、ENGかぴです。
マイコンのソフト開発では割り込みを多く使用します。PIC16F1827において割り込みを使用すると発生時に関数がコールされますが割り込み要因を判別して処理する必要があります。TMR1のオーバーフローを割り込みを使って動作確認します。
割り込みを使用せずにTMR1で使用したい場合は下記記事を参考にしてください。
割り込みの考え方と注意事項については下記を参考にしてください。
PICマイコン(PIC12F675)の割り込みの考え方と注意事項
PIC16F1827で動作確認したことについてリンクをまとめています。
PICマイコン(PIC16F1827)で実現できる機能と解説リンクまとめ
TMR1割り込みの設定
PIC16F1827では割り込み機能を許可する設定と各ペリフェラルの割り込みを許可することで該当する割り込みを使用することができます。
割り込みに使用するレジスタ
TMR1のオーバーフローを割り込みを使用する場合はINTCONレジスタとPIE1レジスタを操作する必要があります。

INTCONレジスタではbit7のGIEビットをセットすると割り込み機能が許可されます。INTCONレジスタに無い割り込みを使用する場合はPEIEビットをセットします。
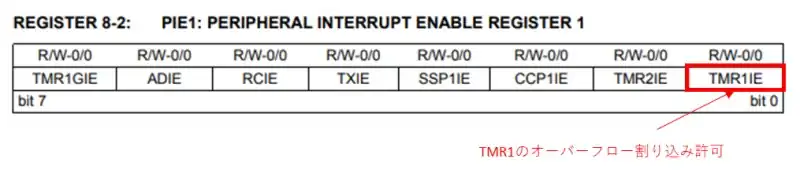
TMR1に関する割り込みの設定はPIE1レジスタで設定を行います。TMR1のオーバーフロー割り込みを使用するためTMR1IEビットをセットします。
PR:
わからないを放置せず、あなたにあったスキルを身に着けるコツを教える テックジムPython入門講座の申込
TMR1と割り込みの設定
PIC16F1827の設定はMCCを使っています。MCCの使い方については下記記事にまとめています。
MPLAB Code Configurator(MCC)の追加と使い方
最初に共通事項であるSystem Moduleの設定を行います。MPLAB X IDEを起動しMCCのアイコンをクリックしてMCCを有効にします。
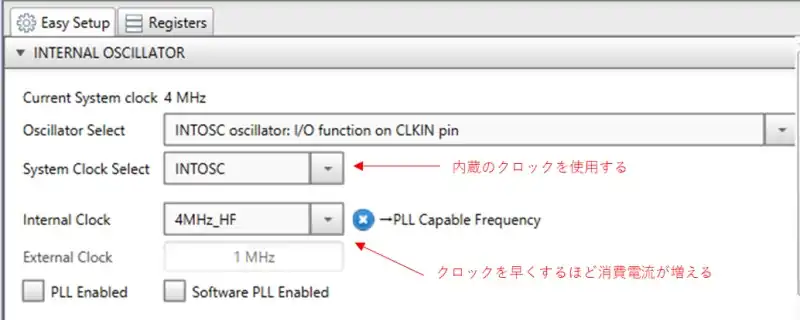
内部クロックを使用するためINTOSCを選択しています。Intemal Clockは4MHz(任意でも良い)を選択しています。クロックを高速にするほど消費電流が増えてしまいます。
TMR1はDevice Resources内のPeripherals欄のTimerを選択しTMR1をクリックして追加します。
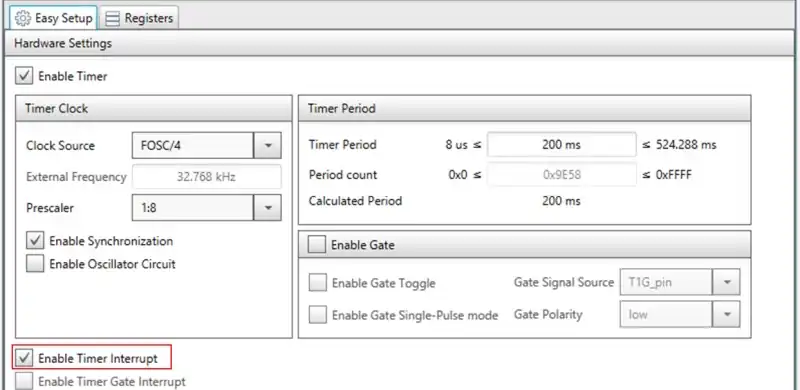
TMR1のオーバーフロー割り込みを使用する場合はEnable Timer Interruptをチェックします。TMR1を200ms毎にオーバーフローさせるためプリスケーラを1:8にしてTimer Periodに200msを入力しています。
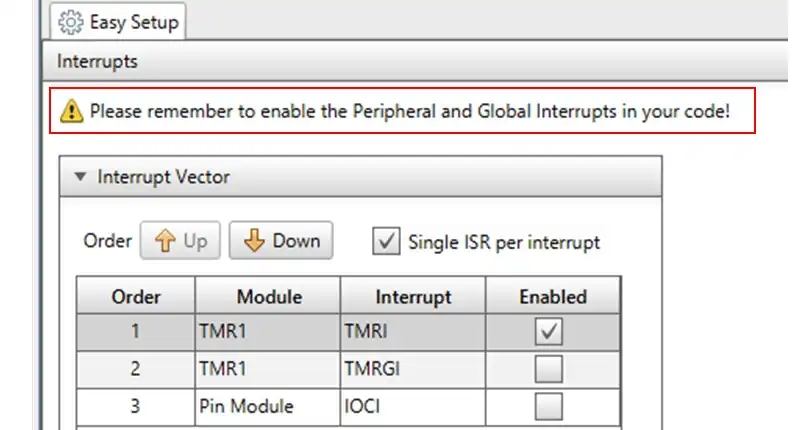
TMR1でEnable Timer Interruptにチェックを入れるとProject Resources内のInterrupt ModuleにTMR1の割り込みベクターが設定されます。この画面では特に設定は不要ですがPeripheralとGlobal Interruptsを許可する必要があることを通知しています。
割り込みの処理を確認
MCCが作成したTMR1及び割り込みについて確認します。割り込みの処理はinterrupt_manager.cにソースコードがあります。
void __interrupt() INTERRUPT_InterruptManager (void)
{
// interrupt handler
if(INTCONbits.PEIE == 1)
{
if(PIE1bits.TMR1IE == 1 && PIR1bits.TMR1IF == 1)
{
TMR1_ISR();
}
else
{
//Unhandled Interrupt
}
}
else
{
//Unhandled Interrupt
}
}割り込みが発生するとINTERRUPT_InterrutManger()がコールされます。PIC16F1827においては割り込み関数が共通であるため割り込み要因によって処理を分岐させる必要があります。
今回はTMR1オーバーフロー割り込みのみなのでTMR1の割り込み要因を判断するTMR1IEとTMR1IFによる分岐のみとなっています。TMR1がオーバーフローするとTMR1_ISR()をコールします。処理の内容はTMR1_ISR()はtmr1.cで確認できます。
void TMR1_ISR(void)
{
// Clear the TMR1 interrupt flag
PIR1bits.TMR1IF = 0;
TMR1_WriteTimer(timer1ReloadVal);
if(TMR1_InterruptHandler)
{
TMR1_InterruptHandler();
}
}割り込み要因の判定を行った後TMRIFをクリアしています。その後TMR1_WritTimer()でタイマ値の初期値を書き込んでいます。TMR1_InterruptHandlerはコールバックする関数を登録しておくことでユーザーが実装した関数を呼び出すことができます。
void TMR1_SetInterruptHandler(void (* InterruptHandler)(void)){
TMR1_InterruptHandler = InterruptHandler;
}
//ユーザー関数TMR1_INTを登録する場合の例
TMR1_SetInterruptHandler(TMR1_INT);main.c内のwhile(1)に入る前にコールする関数を指定します。TMR1がオーバーフローした場合にユーザー関数であるTMR1_INT()をコールさせるための実装例を示しています。
PR:RUNTEQ(ランテック )- マイベスト4年連続1位を獲得した実績を持つWebエンジニア養成プログラミングスクール
TMR1オーバーフロー割り込みを実装
MCCが作成した関数をmain.cに組み込んでTMR1オーバーフロー割り込みの効果を確認します。delay_ms()で数秒間をソフトウェアウェイトを置いている場合でも割り込みによってDOを操作してLEDを点灯/消灯させます。
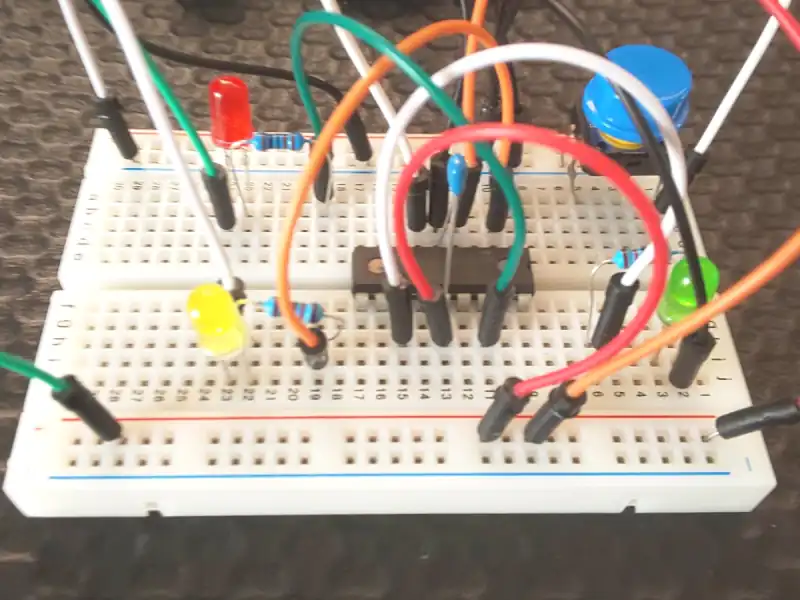
動作確認用の回路
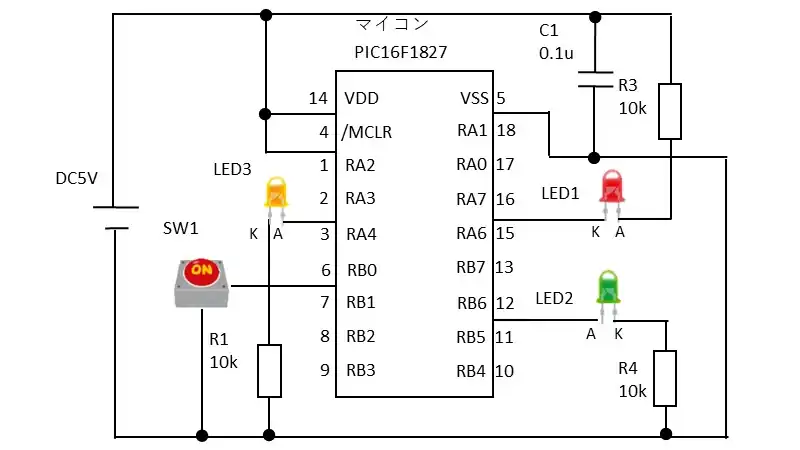
LED1とLED2はHアクティブとLアクティブのハード構成にしているためRA7とPB6をHIGHにしても反対の動きになります。SW1を押したときLED3が点灯するようにします。
RB0はウィークプルアップしているため信号レベルが浮くことはありません。SW1を押すとLED3が点灯し押さない場合はLED3が消灯するようにします。ピン設定は以下の通りです。
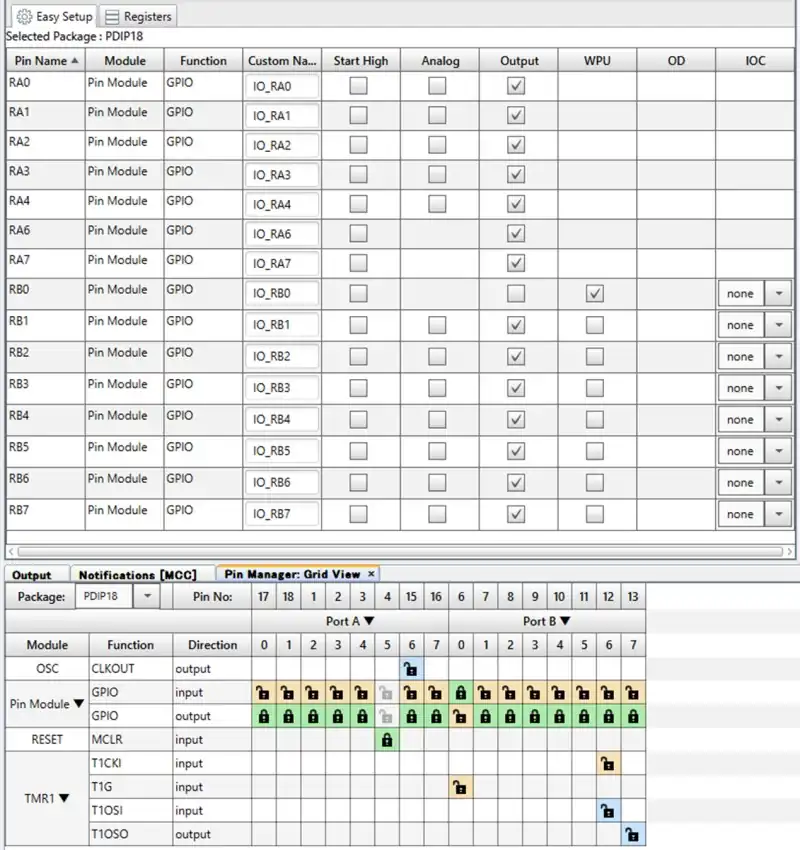
PB0はINPUTでウィークプルアップ(WPU)設定しています。WPUを有効にするためにはRegistersのnWPUENをenabledにする必要があります。
Easy SetupでWPUにチェックするのみでは有効にならないので注意が必要です。Notificationsにワーニングで通知されます。
PR:スキマ時間で自己啓発!スマホで学べる人気のオンライン資格講座【スタディング】まずは気になる講座を無料で体験しよう!
初期化とユーザー関数を実装
main.cに割り込みを実装する手順は以下の通りになります。
- INTERRUPT_GlobalInterruptEnable()のコメントを外す
- INTERRUPT_PeripheralInterruptEnable()のコメントを外す
- TMR1_SetInterruptHandler(関数名)に割り込み発生時にコールする関数を指定
- ユーザー関数を実装する
#include "mcc_generated_files/mcc.h"
/* 関数プロトタイプ宣言 */
void mainApp(void); //メイン関数内での処理
void TMR1_INT(void); //タイマー1割り込みでの処理
void main(void)
{
SYSTEM_Initialize();
INTERRUPT_GlobalInterruptEnable(); //GIEをセット
INTERRUPT_PeripheralInterruptEnable(); //PEIEをセット
TMR1_SetInterruptHandler(TMR1_INT); //TMR1割り込み時にコールする関数を指定
while (1)
{
mainApp();
}
}
/* main処理 */
void mainApp(void){
if( IO_RB0_GetValue()){ //DIによる判断
IO_RA3_SetLow(); //RA3をLOW
}else{
IO_RA3_SetHigh(); //RA3をHIGH
__delay_ms(10000); //10秒間ソフトウェアウェイト
}
}
/* TMR1オーバーフロー割り込みでの処理 */
void TMR1_INT(void){
IO_RA7_Toggle(); //RA7の出力を反転
IO_RB6_Toggle(); //RB6の出力を反転
}main.cの実装例を示しています。while(1)に入る前に初期化処理を行っています。割り込み許可のコメントを外すと割り込みが有効になります。TMR1オーバーフロー割り込みが発生するとTMR1_INTがコールされるようにしています。
mainApp()内においてSW1を押すことでRB0のDIがLOWになるとRA3を操作することでLED3を点灯させ__delay_ms(10000)によって10秒間ソフトウェアウェイトとなります。
本ソースコードはMPLAB X IDEにMCCのプラグインをインストールしていることが前提となります。MCCをインストールする方法は下記記事を参考にしてください。
MPLAB Code Configurator(MCC)の追加と使い方
関連リンク
PICマイコンを使ってマイコンのレジスタの設定やMPLAB X IDEのプラグインであるMCCを使用して動作確認したことについてまとめています。
PICマイコン(PIC12F675)で実現できる機能と解説リンクまとめ
PICマイコン(PIC16F1827)で実現できる機能と解説リンクまとめ
PR:外資系・IT業界などハイクラスの転職に強い【AXIS Agent】
最後まで、読んでいただきありがとうございました。