こんにちは、ENGかぴです。
Arduino環境でDIの信号レベルを判定しているとスイッチの切り替えなどで発生するチャタリングのため誤動作の原因になることがあります。タイマライブラリを使用してDIのチャタリングの防止を行う方法をまとめました。
ESP32-WROOM-32E開発ボード(秋月電子)を使用しArduino IDEで開発を行います。Arduino IDEで開発環境の作り方については下記記事を参考にしてください。
ESP32-WROOM-32Eの開発環境(Arduino IDE)を作り方
ESP32-WROOM-32Eを使って動作確認したことをまとめています。
ESP32-WROOM-32Eで学べるソフト開発と標準ライブラリの使い方
タイマを実装する
ESP32-WROOM-32Eの開発環境ではタイマに関するライブラリが標準で搭載されています。スケッチ例である「RepeatTimer」を引用しながらタイマの設定を行いDIフィルタを実装していきます。
タイマの設定
ESP32にはハードウェアタイマが4つあります。タイマ設定で任意の値をセットするとタイマカウントが更新されていき時間経過によって割り込みが発生します。
hw_timer_t *timer = NULL;
void setup() {
//timerSemaphore = xSemaphoreCreateBinary(); //セマフォを作ってタイマ起動時に通知
timer = timerBegin(0,80,true); //クロック80MHzを80で分周するので1usが最小分解能
timerAttachInterrupt(timer, &onTimer,true);
timerAlarmWrite(timer,10000,true); // 10msごとにonTimer()がコール
timerAlarmEnable(timer); //timer通知を開始
}timerBegin()でタイマの初期化を行います。第1引数に使用するタイマ(0~3)を選択し、第2引数に動作クロックである80MHzに対する分周比を指定します。80を指定すると1usの分解能を持つタイマになります。第3引数はタイマカウントを増加(true)させるか減少(false)させるかを選択します。戻り値は他の設定で使用するためhw_timerの型ポインタの変数に戻り値をセットしています。
timerAttachInterrupt ()で割り込み関数を設定します。第1引数にtimerBegin()の戻り値をセットします。第2引数に割り込み処理を行う関数をセットします。第3引数に割り込みエッジをトリガ(true)にするかレベル(false)にするかを指定します。
timerAlarmWrite ()はタイマに値をセットします。第1引数にtimerBegin()の戻り値をセットします。第2引数にtimerBegin()の第2引数で設定した分周に対するカウント数を指定します。1usが分解能であった時10000を引数に指定すると10ms毎にタイマ割り込みが発生します。第3引数にtrueを指定すると割り込み発生時に第2引数の値が再設定されます。
timerAlarmEnable ()でタイマをスタートします。引数にtimerBegin()の戻り値を指定します。
PR:キャリア形成でお悩みのあなたへ!初回無料相談で相談できる[coachee]
割り込み関数を実装
void IRAM_ATTR onTimer(void){ //IRAMセクションに割り当てるとRAM領域となり高速となる
#ifdef SEMAPHORE_USE
portENTER_CRITICAL_ISR(&timerMux);
//メインと共用の変数がある場合はこの中で修正ーメイン側も同様にしてクリティカル内で更新する。
portEXIT_CRITICAL_ISR(&timerMux);
xSemaphoreGiveFromISR(timerSemaphore,NULL); //ISRにセマフォ(排他処理)を与えてタスクの割込みを防ぐ
#endif
mainTimer(); //タイマ管理
}タイマ割り込みでコールする関数としてonTimer()を実装します。voidの後ろに記述しているIRAM_ATTRはRAM領域に配置したい場合に指定します。指定しない場合はROM領域(フラッシュメモリ)に配置されます。
セマフォ使用時の例も記述していますがタイマ割り込みを一つしか使用しないのであれば指定する必要はありません。セマフォを利用するとタスク処理中に他のタスクがコールされることを防ぐ(排他処理)ことができます。
タイマ管理
mainTimer()の処理を行い各種タイマを管理します。
void mainTimer(void){
if( timLedOnOff > TIME_UP ){
--timLedOnOff;
}
if( timDifilter > TIME_UP ){
--timDifilter;
}
}mainTimer()は10ms毎にコールされるためtimLedOnOff及びtimDifilterは10ms毎に更新されるタイマとなります。timLedOnOffに20をセットした場合は200msのタイマとなります。このようにタイマ変数に値をセットすることで任意のタイマを作ることができます。
チャタリング防止のDIフィルタを実装
マイコンのDIはデジタル入力で入力された電圧値からHighレベル(1)かLowレベル(0)かの判定を行います。スイッチのチャタリングなどが原因でマイコンが誤動作する可能性があるため注意が必要です。
DI信号のチャタリング
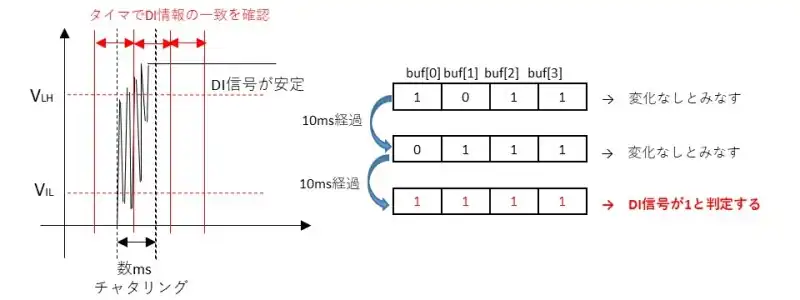
スイッチがONからOFFになったときスイッチの接触抵抗などによって電圧レベルが安定しない瞬間があります。数ms経過するとDI信号が安定するため、安定後にDI情報を取り込む対策が必要です。
僅か数ms間ではありますが1と0が繰り返されること0からフィルタを入れていなかった場合誤動作の可能性があります。リレーの接点などは容量が大きくチャタリングが大きく出ることがあります。
周辺回路でコンデンサを入れたりすることでチャタリングの高周波成分を減衰させることができますが、完全に除去できるわけではありません。
DIフィルタを実装する
タイマを利用することで10ms毎にDIの情報を確認し複数回一致したとき値を採用する方法でDIフィルタを実装します。
void DiFilter(void){
bool boo = true;
uint8_t i;
if( timDifilter == TIME_UP ){
timDifilter = TIM_DIFILT;
diData.buf[diData.wp] = digitalRead(PIN_DI_SW); //DI情報を取得
for( i=1; i < sizeof(diData.buf);i++){
if( diData.buf[i - 1] != diData.buf[i]){
boo = false; //一度でも不一致があればfalseとなる
}
}
if(boo){ //データがすべて一致なので採用する
diData.di1 = diData.buf[0];
}
if( ++diData.wp >= sizeof(diData.buf)){
diData.wp = 0;
}
}
}timDifilterがタイムアップするとDI情報を取得しDI情報を格納するバッファを更新します。全てのバッファの値が一致したときDI情報として採用するためチャタリングによる不安定な部分を取り除く事ができます。
タイマの値を短くしたりバッファの値を増やす方法を選択したりすることで任意のフィルタを実装することができます。
動作確認
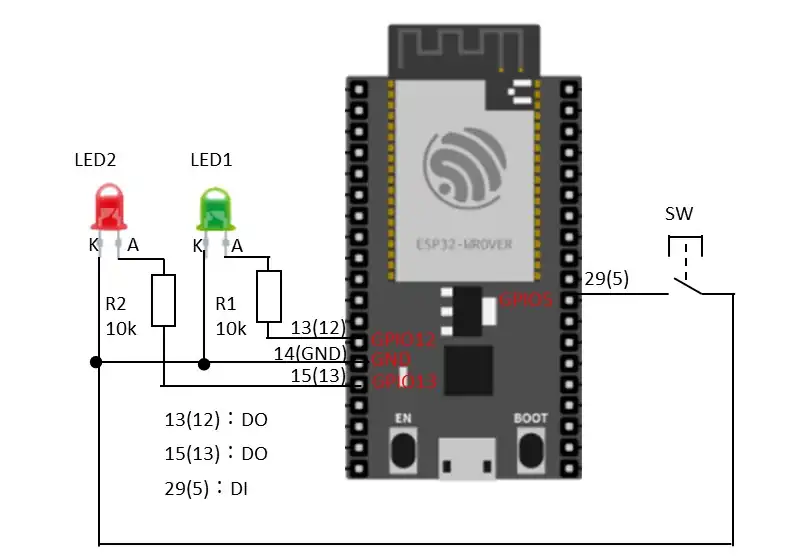
回路図の番号はESP32-WROOM-32Eの左上を1ピンとした時反時計回りにピンを数えた場合の番号としています。ピン番号横の()内の番号はシルク印刷されているピンの名称です。
SWに接続しているDIはプルアップを使用する設定にしているためSWを押したときGNDと直接接続しても問題ありません。
電源を入れるとタイマがスタートしLED2を点灯/消灯します。SWを押すと変数を+1してシリアルモニタにSWが押された回数を表示してLED1を点灯します。LED1はSWが押された場合に点灯/消灯するようにしています。
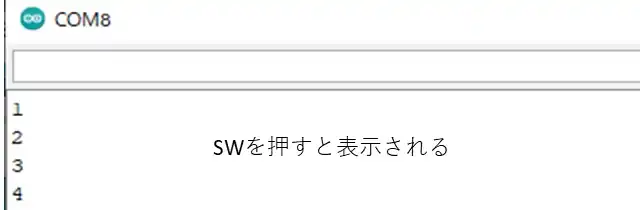
SW押したときにシリアルモニタに押した回数が表示されていることを確認しました。また連動してLEDが点灯/消灯していることを確認しました。
ソースコード全体
ソースコードは記事作成時点において動作確認できていますが、使用しているライブラリの更新により動作が保証できなくなる可能性があります。また、ソースコードを使用したことによって生じた不利益などの一切の責任を負いかねます。参考資料としてお使いください。
#define PIN_DO_LED 13
#define PIN_DO_LDE2 12
#define PIN_DI_SW 5
#define TIME_UP 0
#define TIME_OFF -1
#define TIM_LED_ONOFF 50 //50*10 ms = 500ms
#define TIM_DIFILT 1
#define DIFILT_MAX 4
//#define SEMAPHORE_USE //セマフォを使い場合コメントを外す
typedef struct DIFILT{
uint8_t wp;
uint8_t buf[DIFILT_MAX];
uint8_t di1;
};
/* 変数宣言 */
hw_timer_t *timer = NULL;
#ifdef SEMAPHORE_USE
volatile SemaphoreHandle_t timerSemaphore; //コンパイラに最適化されないようにする
portMUX_TYPE timerMux = portMUX_INITIALIZER_UNLOCKED;
#endif
uint32_t testcnt;
int16_t timLedOnOff = TIME_OFF;
int16_t timDifilter = TIME_OFF;
bool flg;
DIFILT diData;
/* プロトタイプ宣言 */
void IRAM_ATTR onTimer(void);
void mainApp(void);
void mainTimer(void);
void DiFilter(void);
void setup() {
uint8_t i;
pinMode(PIN_DO_LED, OUTPUT);
pinMode(PIN_DO_LDE2,OUTPUT);
pinMode(PIN_DI_SW,INPUT_PULLUP);
Serial.begin(115200);
#ifdef SEMAPHORE_USE
timerSemaphore = xSemaphoreCreateBinary(); //セマフォを作ってタイマ起動時に通知
#endif
timer = timerBegin(0,80,true); //クロック80MHzを80で分周するので1usが最小分解能
timerAttachInterrupt(timer, &onTimer,true);
timerAlarmWrite(timer,10000,true); //コールバックするタイミングを指定 10msごとにonTimer()がコール
timerAlarmEnable(timer); //timer通知を開始
timLedOnOff = TIM_LED_ONOFF;
timDifilter = TIM_DIFILT;
while( i < 10){
DiFilter();
delay(10);
i++;
}
}
void loop() {
mainApp();
DiFilter();
}
/* タイマ割り込みによってコールする関数 */
void IRAM_ATTR onTimer(void){ //IRAMセクションに割り当てるとRAM領域となり高速となる
#ifdef SEMAPHORE_USE
portENTER_CRITICAL_ISR(&timerMux);
//メインと共用の変数がある場合はこの中で修正ーメイン側も同様にしてクリティカル内で更新する。
portEXIT_CRITICAL_ISR(&timerMux);
xSemaphoreGiveFromISR(timerSemaphore,NULL); //ISRにセマフォ(排他処理)を与えてタスクの割込みを防ぐ
#endif
mainTimer();
}
/* メイン関数 */
void mainApp(void){
if( timLedOnOff == TIME_UP){
timLedOnOff = TIM_LED_ONOFF;
digitalWrite(PIN_DO_LED,!(digitalRead(PIN_DO_LED))); //Toggle LED13 Pin
}
if( diData.di1 == 0 ){
if( flg == false ){
flg = true;
++testcnt;
Serial.println(testcnt);
digitalWrite(PIN_DO_LDE2,!(digitalRead(PIN_DO_LDE2)));
}
}
else{
flg = false;
}
}
/* タイマ管理 */
void mainTimer(void){
if( timLedOnOff > TIME_UP ){
--timLedOnOff;
}
if( timDifilter > TIME_UP ){
--timDifilter;
}
}
/* DIフィルタ */
void DiFilter(void){
bool boo = true;
uint8_t i;
if( timDifilter == TIME_UP ){
timDifilter = TIM_DIFILT;
diData.buf[diData.wp] = digitalRead(PIN_DI_SW);
for( i=1; i < sizeof(diData.buf);i++){
if( diData.buf[i - 1] != diData.buf[i]){
boo = false;
}
}
if(boo){ //データがすべて一致なので採用する
diData.di1 = diData.buf[0];
}
if( ++diData.wp >= sizeof(diData.buf)){
diData.wp = 0;
}
}
}関連リンク
Arduinoのライブラリを使って動作確認を行ったことを下記リンクにまとめています。
Arduinoで学べるマイコンのソフト開発と標準ライブラリの使い方
Seeeduino XIAOで学べるソフト開発と標準ライブラリの使い方
ESP32-WROOM-32Eで学べるソフト開発と標準ライブラリの使い方
広告
マイベスト4年連続1位を獲得した実績を持つ実践型のプログラミングスクール

最後まで、読んでいただきありがとうございました。