こんにちは、ENGかぴです。
マイコンのソフト開発を行うと必ずと言っていいほどI/Oポートの制御を行います。I/Oポートを操作して外部機器にONしたりLEDを点灯させて通知したり警報を鳴らしたりと用途は様々です。マイコン開発の基礎ともいえるI/Oポートの操作について説明します。
PIC12F675を使ってマイコンの動きを勉強するためにPIC12F675の機能でできることについてまとめています。
PICマイコン(PIC12F675)で実現できる機能と解説リンクまとめ
PICマイコン(PIC12F675)の初期化
PICマイコンの開発環境であるMPLAB X IDEがインストールされていることを前提に進めていきます。初めにCONFIG設定を行います。MPLAB X IDEのインストールの方法は下記記事にまとめています。
MPLAB X IDEによるPICマイコンの開発環境作りの手順
この設定はPICマイコンを使う上で重要な設定を行う個所になります。マイコンが動くために必要なクロックを外部から供給するか内部のクロックを使用するかなど各項目を見ながら設定していきます。
Configuration Bitsの設定
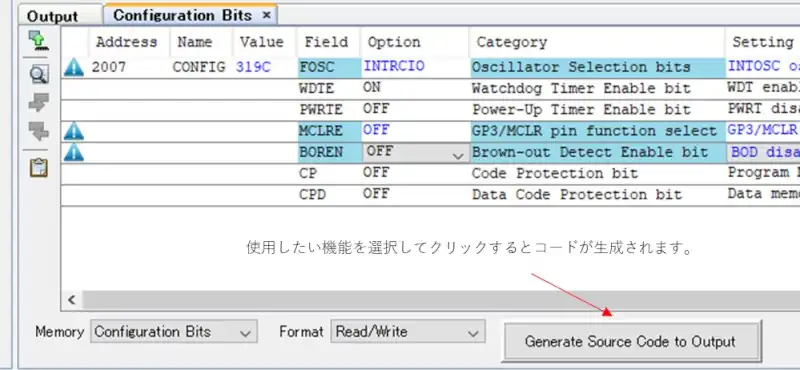
main.cを作成するとmain関数のみの画面になります。始めに「Configuration Bits」の設定を行います。エディターの上面ツールのProductionから「Set Configuration Bits」をクリックするとエディターの下に設定できる内容が表示されます。今回設定しておきたい内容は、FOSC・MCLREです。
FOSCは内部のクロックを使用しGP4をI/Oとして使用したいのでINTRCIOを選択します。MCLREは入力専用ピンですが、ONにするとリセット端子になるためOFFのままにします。OFFにするとGP3(DI)として使用できます。
この設定が完了したら選択項目欄の下に「Generate Source Code to Output」をクリックするとソースが作成されます。これをすべてmain関数の上に貼り付けます。次はmain関数の中で各種機能の初期化を行っていきます。
PR:RUNTEQ(ランテック )- マイベスト4年連続1位を獲得した実績を持つWebエンジニア養成プログラミングスクール
各種機能の初期化
PIC12F675の各種機能の初期化を行っていきます。今回はGPIO端子はLEDを点灯させるのみなのでI/Oポートの設定のみとなります。
マイコンはクロックを逓倍して分周して動作クロックを選択するものもありますが、今回はPIC12F675の内部のクロックを使用するため4MHz固定となります。
設定しない場合でもソースに記述しておくと意図して設定していないことが明確になり、あとで使用したいときに設定を変えるだけでよいので必要に応じてソースを記述しておくことをお勧めします。
PR:スキマ時間で自己啓発!スマホで学べる人気のオンライン資格講座【スタディング】まずは気になる講座を無料で体験しよう!
I/Oポートの設定
#include <xc.h>
//--------------定数定義----------------------------
#define _XTAL_FREQ 4000000 //delay関数を使用するときに必要 4MHz
void main(void) {
//各種初期化
ADCON0 = 0x00; //ADC使用しない
ANSEL = 0x00; //アナログモードは使用しない
CMCON = 0x07; //コンパレータ使用しない
TRISIO = 0x08; //GP3はDI・その他はDO
GPIO = 0x00; //ポートの設定 1:High 0:Low
//各種初期化 ENDI/Oポートの設定はADCの設定やコンパレータの設定とリンクしている部分もありますので同時にやっておくほうが良いと思います。
今回はADCとアナログモードとコンパレータは使用しないので使用しない設定にしておきます。
このように各種機能とレジスタの設定がリンクしていることもあります。CMCONは使用しない場合にbit2-0に1をセットする必要がるので0x07としています。I/Oポートの設定はTRISIOレジスタで行います。
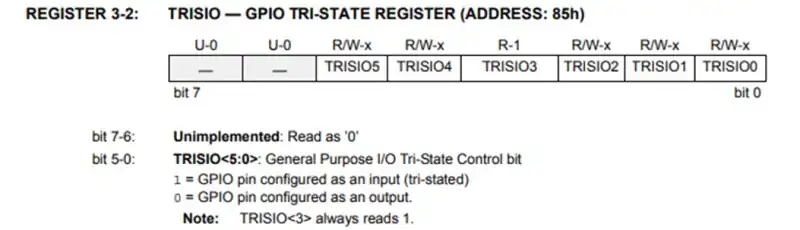
TRISIO0はGP0のI/Oの切り替えTRISIO1はGP1のI/Oの切り替えという具合でGP5までのI/Oの切り替えを考えていきます。PIC12F675においてはGP3はDI固定となります。
今回はGP3以外は出力になるのでTRISIO3が1(GP3は入力固定)となる以外はすべて0をセットします。
PR:
わからないを放置せず、あなたにあったスキルを身に着けるコツを教える テックジムPython入門講座の申込
PICマイコン周辺の回路図を考える
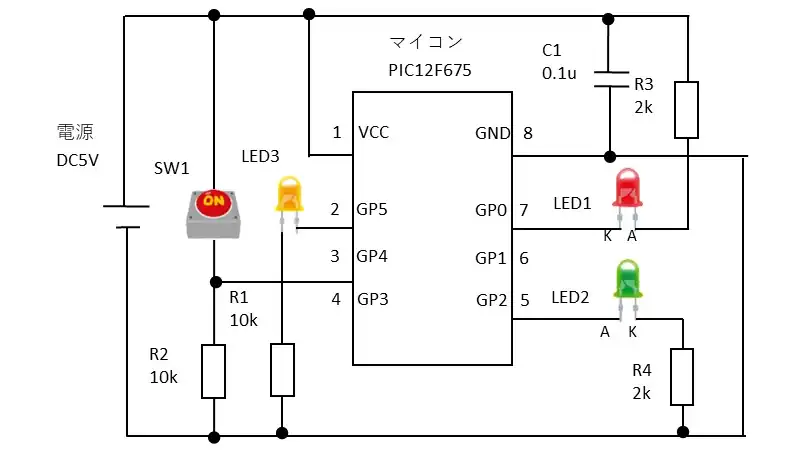
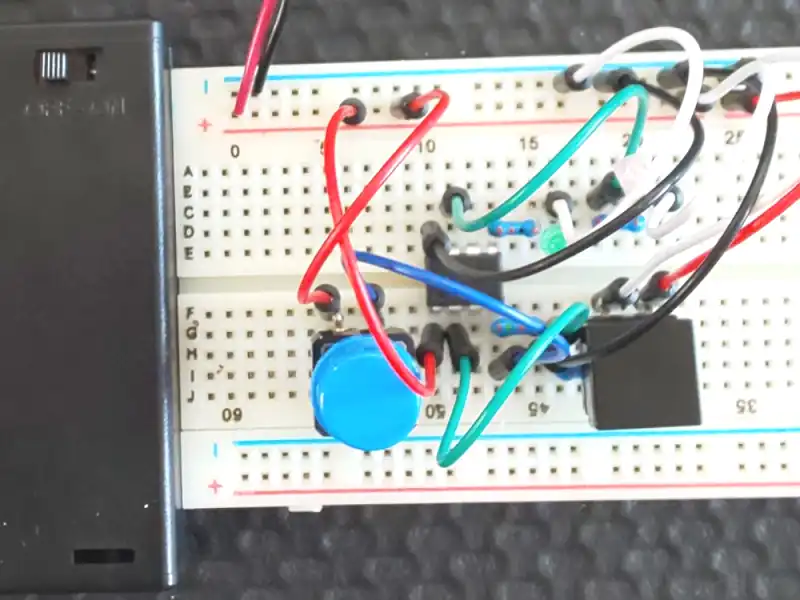
LEDを点灯/消灯させるプログラムを作って動作を確認するためには周辺回路が必要になります。上記の回路図を参考にしてソフトを設計していきます。
この回路図は、GP2とGP0を1にしたとき点灯と消灯の関係が反対になるようにしています。LED3はSW1が押されたときのみ点灯するようにします。
PICマイコンのI/Oポートを制御する
I/Oポートの制御を行う前にmain関数内に無限ループを設けます。無限ループを組んでおかないとマイコンが動作完了してしまうためです。
I/Oポートの制御はこのwhile(1)のループの中で行います。
while( 1 ){
GPIO0 = 1; //Lアクティブ(LED1消灯)
GPIO2 = 1; //Hアクティブ(LED2点灯)
__delay_ms(250); //250msソフトウェアウェイト
GPIO0 = 0; //Lアクティブ(LED1点灯)
GPIO2 = 0; //Hアクティブ(LED2消灯)
__delay_ms(250); //250msソフトウェアウェイト
if( GPIO3 == 1){ //GP3がHレベルか
GPIO5 = 1; //Hアクティブ(LED3点灯)
}
else{
GPIO5 = 0;
}
}GP0を出力するときはGPIO0に0(Low)または1(high)をセットします。GP2の場合はGPIO2に0か1をセットします。このようにして対象のDOを制御してLEDを点灯/消灯させます。
GPIO0とGPIO2に1をセットするとLED1が消灯しLED2が点灯します。__delay_ms(250)はソフトウェアウェイトで250msの間そのまま待機状態となります。アンダーバーは2つあります。
ソフトウェアウェイト後にGPIO0とGPIO2に0をセットするとLED1が点灯しLED2が消灯します。__delay_ms(250)によって250ms間ソフトウェアウェイトで待機します。
if( GPIO3 ==1)はSW1のONOFFを判定します。SWが押されていた場合GPIO3が1(ON)と判定されるのでGPIO5に1をセットしてLED3を点灯させます。0(OFF)と判定されればLED3を消灯します。
この処理を無限に繰り返すことでLEDが点灯/消灯するソフトとなります。ただし、このプログラムには欠点があります。delay関数を使用しているのでmain関数の1周にかかる時間が500ms以上となることです。
ソフトウェアウェイトで待機しているときは処理が行えないためSW1のボタンを押しても反応しないこともあります。
ソースコード全体
ソースコードは記事作成時点において動作確認できていますが、使用しているライブラリの更新により動作が保証できなくなる可能性があります。また、ソースコードを使用したことによって生じた不利益などの一切の責任を負いかねます。参考資料としてお使いください。
// CONFIG
#pragma config FOSC = INTRCIO
#pragma config WDTE = OFF
#pragma config PWRTE = OFF
#pragma config MCLRE = OFF
#pragma config BOREN = OFF
#pragma config CP = OFF
#pragma config CPD = OFF
#include <xc.h>
//--------------定数定義----------------------------
#define _XTAL_FREQ 4000000 //delay関数を使用するときに必要 4MHz
void main(void) {
//各種初期化
ADCON0 = 0x00; //ADC使用しない
ANSEL = 0x00; //アナログモードは使用しない
CMCON = 0x07; //コンパレータ使用しない
TRISIO = 0x08; //GP3はDI・その他はDO
GPIO = 0x00; //ポートの設定 1:High 0:Low
//各種初期化 END
while( 1 ){
GPIO0 = 1; //Lアクティブ(LED1消灯)
GPIO2 = 1; //Hアクティブ(LED2点灯)
__delay_ms(250); //250msソフトウェアウェイト
GPIO0 = 0; //Lアクティブ(LED1点灯)
GPIO2 = 0; //Hアクティブ(LED2消灯)
__delay_ms(250); //250msソフトウェアウェイト
if( GPIO3 == 1){ //GP3がHレベルか
GPIO5 = 1; //Hアクティブ(LED3点灯)
}
else{
GPIO5 = 0;
}
}
}
//---------------------end file----------------------------関連リンク
PICマイコンを使ってマイコンのレジスタの設定やMPLAB X IDEのプラグインであるMCCを使用して動作確認したことについてまとめています。
PICマイコン(PIC12F675)で実現できる機能と解説リンクまとめ
PICマイコン(PIC16F1827)で実現できる機能と解説リンクまとめ
広告
マイベスト4年連続1位を獲得した実績を持つ実践型のプログラミングスクール

最後まで、読んでいただきありがとうございました。
初期化する際の値は0x00というように16進数での表現にしています。2進数での表記は0b00001000になりますが、組み込みエンジニアは16進数でコーディングすることがメインになりますので16進数での表記とします。